

人に付き従いながらサービスを提供するようなロボットにおいては,サービス対象の人を識別し追従することが最も基礎的な機能となる.ロボットが人について行動していると,混みいった環境や厳しい照明条件(逆光など)に遭遇するが,そのような場合でも正しく人を識別することが特に重要な課題となる.
本研究ではLRF(レーザ距離センサ)とカメラを組み合わせることにより,人の服の色・身長・歩容特徴を計測し,それらをオンラインで学習することで目標人物を識別する.通常照明条件下で効果的な色特徴に加え,照明変化にロバストな身長・歩容特徴を環境に応じて動的に組み合わせることで環境を問わず正しく目標人物を識別することを可能とする.
[参考文献]
- K. Koide and J. Miura, "Identification of a Specific Person using Color, Height, and Gait Features for a Person Following Robot" Robotics and Autonomous Systems, 2016.
- 小出健司, 三浦純, "服の色・身長・歩容特徴を用いた付き添いロボットのための人物", 第32回日本ロボット学会学術講演会, 2014.
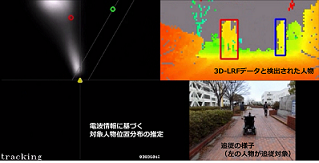
ロボットが付き添いを行うためには,付き添いの対象人物を継続的かつ確実に検出する必要がある.しかし,カメラなどのセンサの視野から外れた場合や,他の人物に隠蔽された場合など,対象人物を見失う状況に対処する必要がある.
本研究では,対象人物が電波の発信源を保持し,それに対し指向性を高速に変化させることのできるアンテナ(エスパアンテナ)をロボット側に設置し,見失った場合にその存在位置を限定することにより,ロバストな追従を実現している.
[参考文献]
- K. Misu and J. Miura, "Specific Person Tracking using 3D LIDAR and ESPAR Antenna for Mobile Service Robots", Advanced Robotics, Vol. 29, No. 22, pp. 1483-1495, 2015.
ロボットに搭載されたセンサのみを用いた人物識別では,ロスト中の見えの変化(上着を脱ぐなど)や超長時間のロストへの対応は依然として困難である.そのような場合には予め対象人物に識別デバイスを持たせておき,それを手がかりとすることが有効である.代表的な識別デバイスを用いる手法としてはRFIDタグやWiFiデバイスによる電波強度からデバイス位置を推定する手法があるが,正確な電波伝播モデルの構築が困難であること,位置推定のためには複数のアンテナを設置する必要があることなどから移動ロボットには必ずしも有効とは言えない.
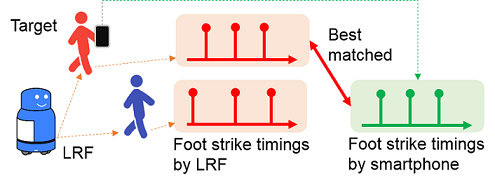
本研究ではまず,対象人物の所持するスマートフォンから得られた加速度から足を地面に接地したタイミングを検出する.同時にロボットに搭載されたLRFから周囲の全ての人の接地したタイミングも計測し,スマートフォンから得られた接地タイミングと最も良く一致する人物を見つけることで人物識別を行う.推定ドリフトや見えの変化などの影響を受けないため長時間のロストに対してロバストな識別が可能となる.
[参考文献]
- K. Koide and J. Miura, "Person Identification Based on the Matching of Foot Strike Timings Obtained by LRFs and Smartphone", IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Daejeon, Korea, 2016.
- 小出健司,三浦 純, "IMUとLRFを用いた接地タイミングの同時性に基づく移動ロボットのための人物認証", 2015年ロボティクス・メカトロニクス講演会,京都,2015年5月.
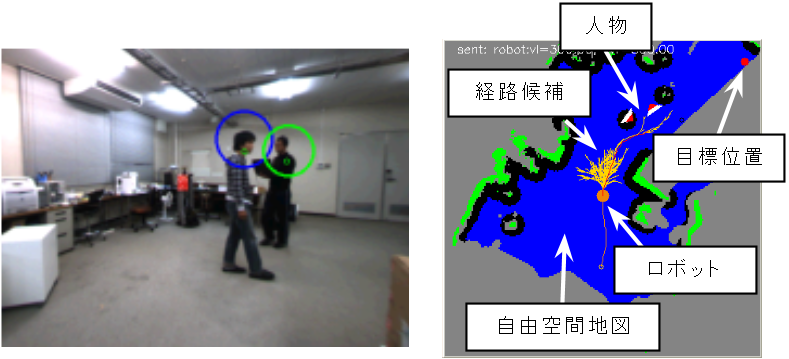
ロボットが付き添いを行うためには,周囲の人物や物体との衝突を避けながら対象人物を追従する経路を生成する必要があるが,安全のためには経路生成を実時間で行わなければならない.
本研究では,目標位置までの到達時間場によってランダム経路探索手法であるRRT(Rapidly-exploring Random Tree)を制御し,さらに3次元空間で動的障害物との衝突をチェックすることにより,実時間での経路生成を行う手法を提案している.
[参考文献]
- I. Ardiyanto and J. Miura, Real-time Navigation using Randomized Kinodynamic Planning with Arrival Time Field, Robotics and Autonomous Systems, Vol. 60, No. 12, pp. 1579-1591, 2012.
- Igi Ardiyanto, Jun Miura, "3D Time-space Path Planning Algorithm in Dynamic Environment Utilizing Arrival Time Field and Heuristically Randomized Tree", 2012 IEEE International conference on Robotics and Automation(ICRA), 2012.
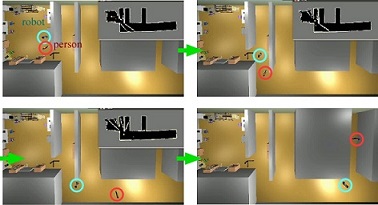
ロボットの付き添いにおいては,常に対象人物の近くを動くような追従行動だけでなく,例えば知人と話をしたり美術館で見回ったりといった状況では,少し離れたところからそっと見守る,といった行動が望ましい場合がある.
本研究では,空間の構造解析に基づき見守りのための視点候補を生成し,また人の移動予測に基づき,見失わない限りロボットの移動を最小化する,という基準でロボットの見守り行動を生成する手法を開発した. これによりロボットのエネルギ消費を抑えるとともに,ロボットが常に側にいるというわずらわしさを減らすことができる.
[参考文献]
- I. Ardiyanto and J. Miura, "Visibility-based Viewpoint Planning for Guard Robot using Skeletonization and Geodesic Motion Model", Proc. 2013 IEEE Int. Conf. on Robotics and Automation, pp. 652-658, Karlsruhe, Germany, May 2013. (Best Service Robotics Paper Award Finalist).
- I. Ardiyanto and J. Miura, "Partial Least Squares-based Human Upper Body Orientation Estimation with Combined Detection and Tracking", Image and Vision Computing, Vol. 32, No. 11, pp. 904-915, 2014.
- I. Ardiyanto and J. Miura , "Human Motion Prediction Considering Environmental Context", Proc. 2015 IAPR Int. Conf. on Machine Vision Applications, pp. 390-393, Tokyo, Japan, May 2015.

画像による顔発見・認識は,人をサポートするロボットなどの応用に幅広く利用されているが,逆光などの悪照明条件下では,一般にその性能が低下するため,屋外で動作するサービスロボットなどの応用において課題となっている.
本研究では,さまざまな照明下での顔画像を顔特有の模様や特徴を維持しつつ一定の見え方になるような,新たな変換方法を開発した.GAによって最適化したファジィ規則を用いて,輝度の調整量を適応的に変化させることにより,適切な画像変換を実時間で行うことができる.
[参考文献]
- B.S.B. Dewantara and J. Miura, "OptiFuzz: A Robust Illumination Invariant Face Recognition System and Its Implementation" Machine Vision and Applications, 2016.


人に付き添いながらサービスを提供するロボットは,人の行動・状態や周囲の環境を認識し,それに応じた適切な行動をとることが必要となる.
本研究では,移動ロボットのための新しい付き添い方法を提案する.プロトタイプとして,レーザ距離センサ(LRF)を用いて対象人物の歩き行動と座り行動を認識し,人の状態に応じた付き添い行動を行うロボットを開発した.
[参考文献]
- S. Oishi, Y. Kohari, J. Miura, "Toward a Robotic Attendant Adaptively Bahaving according to Human State", Proc. 2016 IEEE Int. Symp. on Robot and Human Interactive Communication (RO-MAN 2016), New York, U.S.A, Aug. 2016(to appear).
- 小針義貴,小出健司,三浦 純,大石修士, "人の状況に応じた付き添いロボットの行動計画", 2016年ロボティクス・メカトロニクス講演会,横浜,2016年6月.