自動運転
道路領域の推定
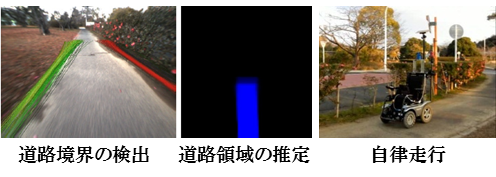
道路領域の推定は,自動走行・自律移動のための基本機能の一つであり,さまざまな環境においてロバストに検出を行う手法が必要である.
そこで,本研究ではセンサから得られる多種情報(色,エッジ,高さ)を利用し,また多様な道路形状に適応できる柔軟な境界線モデルと統合することにより,ロバストに領域境界を推定する手法を提案している.
[参考文献]
- Y. Matsushita, J. Miura, "On-Line Road Boundary Modeling with Multiple Sensory Features, Flexible Road Model, and Particle Filter", Robotics and Autonomous Systems, Vol. 59, No. 5, pp. 274-284, 2011.
- T. Chiku and J. Miura, "On-line Road Boundary Estimation by Switching Multiple Road Models using Visual Features from a Stereo Camera", Proc. 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4939-4944, Vilamoura, Algarve, Portugal, Oct. 2012.
歩行者の検出
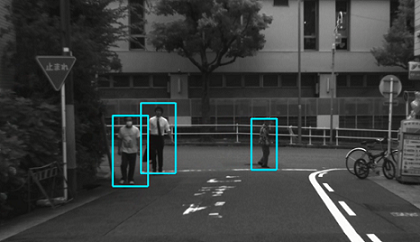
自動運転や運転支援システムでは周囲環境の認識が重要である.その中でも,歩行者のロバストな検出は交通事故軽減の点から極めて重要である.
そこで,本研究では3Dレーザ距離センサとカメラを利用し,歩行者の3次元形状の新たなモデルの利用と画像情報との効果的な統合により,歩行者を高信頼で検出する手法を提案している((株)豊田中央研究所との共同研究).
[参考文献]
- K. Kidono, T. Naito, and J. Miura, "Reliable Pedestrian Recognition Combining High-definition LIDAR and Vision Data", Proc. 15th IEEE Int. Conf. on Intelligent Transportation Systems, pp. 1783-1788, Anchorage, AK, USA, Sep. 2012.
- K. Kidono, T. Miyasaka, A. Watanabe, T. Naito, and J. Miura, "Pedestrian Recognition Using High-Definition LIDAR", Proc. 2011 IEEE Intelligent Vehicles Symp., pp. 405-410, 2011.
人と自転車の同時識別
一般道路環境では他車だけでなく,歩行者や自転車など様々な対象の認識が必要となるが,これまで主に歩行者の識別が研究の対象であった.
そこで本研究では,LIDAR-カメラ統合による歩行者・自転車同時識別手法の開発に取り組んでいる.前処理としてサイズでの候補分類を行い,次に点群特徴量と画像特徴量を組み合わせることで識別を行う.
[参考文献]
- 波平勇気,三浦 純,大石修士, LIDAR-カメラ統合による歩行者・自転車検出, 2016年ロボティクス・メカトロニクス講演会, 横浜, 2016年6月.