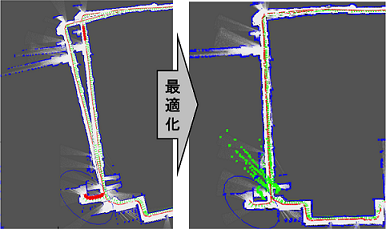
移動ロボットが学校や病院等の広域な屋内空間でサービスを提供する場合には,その空間内におけるロボットの自己位置情報が必要不可欠である.自己位置を推定する場合には,ロボットに搭載されたセンサの情報に応じた地図が必要になるが,ロボットを手動で操作し地図を作成するのは広域な環境では非常に手間がかかる.
本研究では,広域な屋内環境において,リアルタイムにループクロージング問題を解消することに焦点を当てた全自動の地図生成システムと,生成された地図を基にした自己位置の推定によるサービスを提供することを目的とする.
[参考文献]
- 工藤拓,三浦 純, 広域屋内環境で移動するロボットのための地図生成と位置推定, 2015年ロボティクス・メカトロニクス講演会, 京都, 2015年5月.
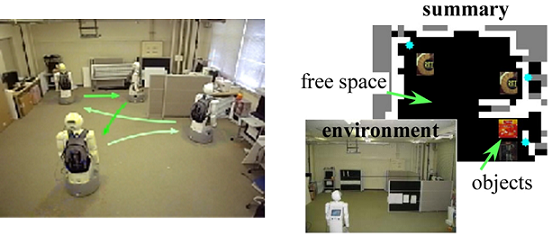
移動ロボットが動作する環境の情報(空間構造や物体配置など)を得ること(環境情報要約と呼ぶ)は,ロボットが自律動作するために必要である.一般に情報要約のための時間には制約があるので,効率のよい要約のための認識プラニングが重要となる.
本研究では,認識結果の不確かさや隠蔽領域の状況など,さまざまな不確かさを考慮し,最適な視点系列を生成する手法を提案する.本手法は時間制約を陽に考慮しており,与えられた時間に応じて適切な環境情報要約を行うことができる.
[参考文献]
- 増沢広朗,三浦 純. "移動ロボットによる時間制約を考慮した環境情報要約のための視点計画",日本ロボット学会誌,Vol. 28, No. 8, pp. 938-945, 2010.
- H. Masuzawa and J. Miura, "Observation Planning for Environment Information Summarization with Deadlines", Proc. 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 30-36, Taipei, Taiwan, Oct. 2010.
- M. Boussard and J. Miura, "Observation planning for object search by a mobile robot with uncertain recognition", Proc. 12th Int. Conf. on Intelligent Autonomous Systems, F3B.5, Jeju Island, Korea, June 2012.

未知環境の地図生成では,未観測領域を計算し,それに基づいて環境探査のための視点を繰り返し選択する必要がある.さらに,すべての空間を均一に観測するのではなく,重要な領域(例えば,地図に記述すべき物体が存在する領域)を重点的に観測するための視点計画も必要になる.
本研究では,フロンティア法に基づく未知環境探査と,センサの観測範囲を考慮した視点の最適化を組み合わせて,屋内3次元環境地図を効率的に生成する手法を開発している.
[参考文献]
- Y. Okada and J. Miura, "Exploration and Observation Planning for 3D Indoor Mapping", Proc. 2015 IEEE/SICE Int. Symp. on System Integration (SII-2015), pp. 599-604, Nagoya, Japan, Dec. 2015.
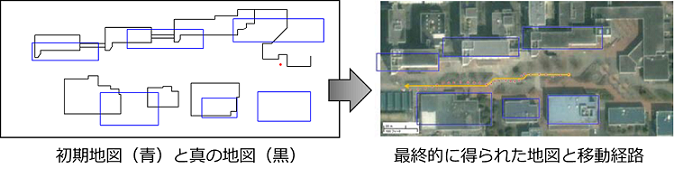
人は手書きの地図を見ながら目的地へたどり着くことができる.手書き地図は,建物の大きさや位置が正しくない,すべての建物・物体が記述されてはいない,といった不確かさがあり,それにより地図上の建物と実際の観測との対応付が困難になる.
本研究では,ステレオ視によって計測された建物の外形と手書き線画地図との対応のあいまいさを考慮し,SLAM(地図と位置の同時推定)と粒子群最適化(PSO)を組み合わせた手法を提案している.
[参考文献]
- K. Matsuo and J. Miura, “Outdoor Visual Localization with a Hand-Drawn Line Drawing Map using FastSLAM with PSO-based mapping,” Proc. 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS2012), pp. 202-207, Oct. 2012.
- K. Matsuo, J. Miura, and J. Satake, “Stereo-based Outdoor Localization using a Line Drawing Building Map,” Proc. 2011 European Conf. on Mobile Robots (5th ECMR), pp. 309-314, Sep. 2011.
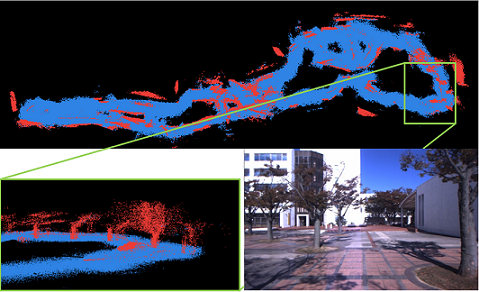
現在,様々な分野においてサービスロボットの開発が行われている.そのようなロボットの運用には,屋内環境だけではなく屋外環境での移動も必要となる.屋外環境におけるロボットの自律移動を実現するためには,周囲の障害物の検出や走行可能領域の推定のような環境認識技術が必要となる.
本研究では,ロボットに搭載した距離センサ,ステレオカメラを利用した複数の移動量推定方法による位置推定と地図生成と,画像を基にしたループクロージャの検出,及びこの情報を基にした地図全体の最適化を行うことにより,移動量推定を重ねることにより生じる誤差を小さくすることを目的とする.
[参考文献]
- 酒井貴大, 三浦純, "移動ロボットによる屋外広域3次元地図の生成", 2015年ロボティクス・メカトロニクス講演会, 京都, 2015年5月.
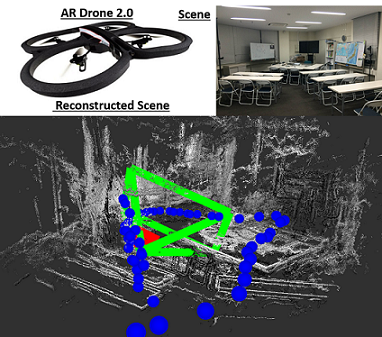
ドローンは地上の移動ロボットと比較して,道路条件に影響されず上空での稼働が行える点で優れ,高層建造物の点検や複雑な地形の巡回警備への応用が期待される.ドローンの自律飛行では,周囲の地図の生成や自己位置推定,障害物を考慮した経路計画が求められるが,人の手での地図生成には大きな手間がかかる.
本研究では,比較的安価な単眼カメラを用いた画像ベースの3次元復元と自己位置推定を基に,未探査空間の3次元地図を生成し,障害物を考慮した移動計画により自律飛行での3次元環境地図生成システムの実現を目的とする.
[参考文献]
- 永井源樹,三浦 純,大石修士,ドローンを用いたVisual SLAMに基づく3次元地図生成, 2016年ロボティクス・メカトロニクス講演会, 神奈川, 2016年5月.