付き添いロボット
カメラや距離センサを用いて周囲環境を認識し,自律的に行動するロボットを開発しています.また,相手を気遣いながら付き添ったり案内したりできるロボットの実現を目指しています.
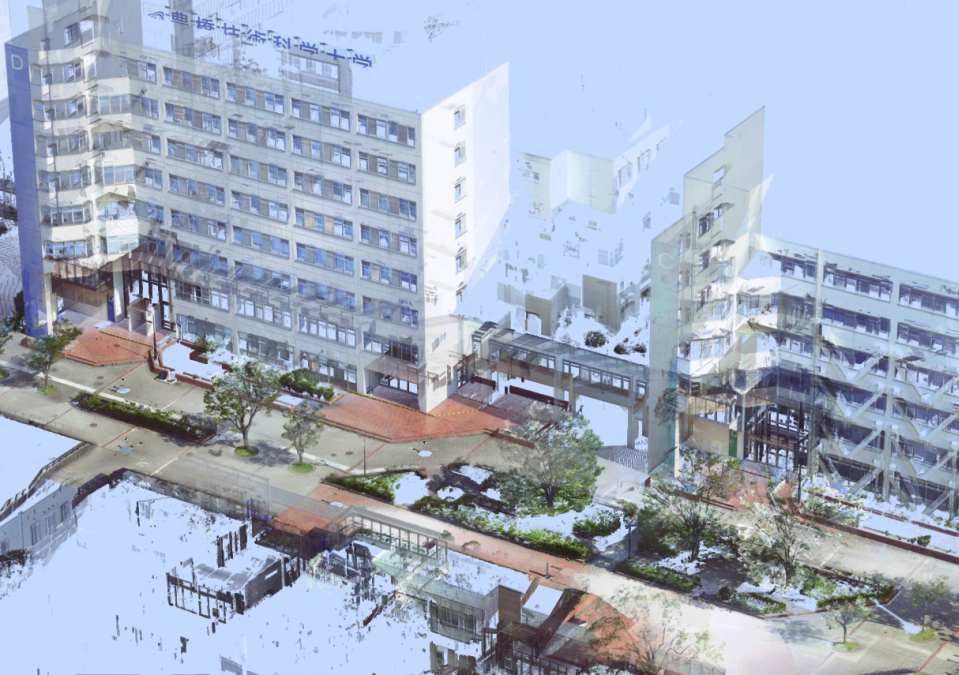
地図生成
屋内外のモデリングやロボットの自律移動を目的とした2次元/3次元環境地図の計測システムを開発しています.
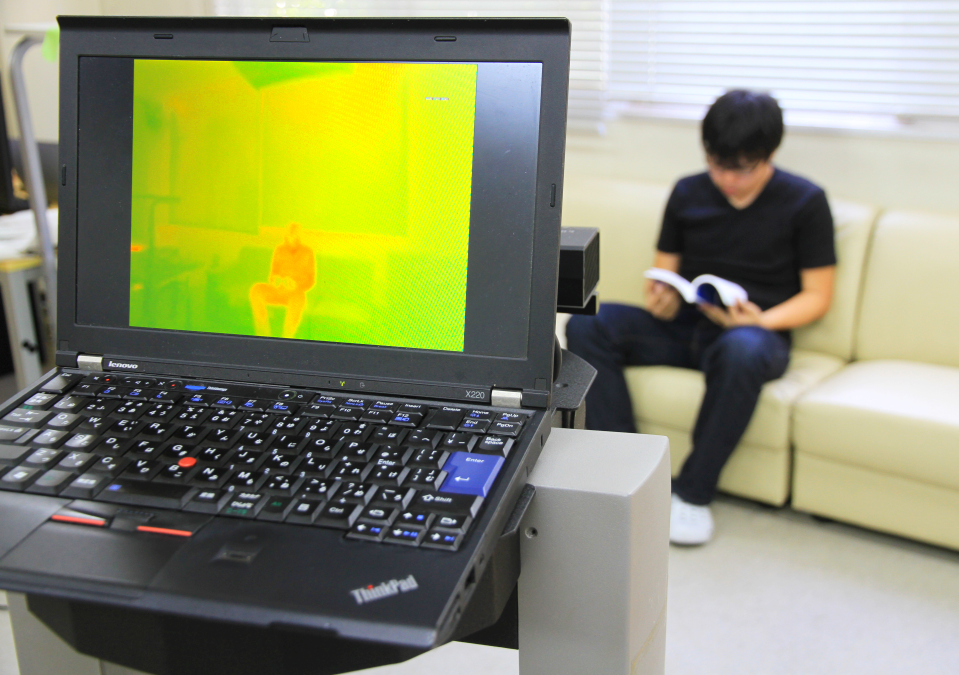
見守りロボット
温度や照明などの室内環境の状態や人の状態を計測・解析することで,温熱環境を考慮した快適な生活を支援するロボットシステムを開発しています.
自動運転
自動運転のための人検出・道路検出をはじめとする環境認識技術を開発しています.
ヒューマンロボットインタラクション
ロボットと人との共同組立作業や,人の動作からの作業学習・人への作業教示等について研究しています.また,脳波等を用いたロボット操作のための直感的インタフェースの開発にも取り組んでいます.
屋外ナビゲーション
カメラ画像や3次元距離センサを利用し,屋外環境でナビゲーションを行うロボットの開発をしています.