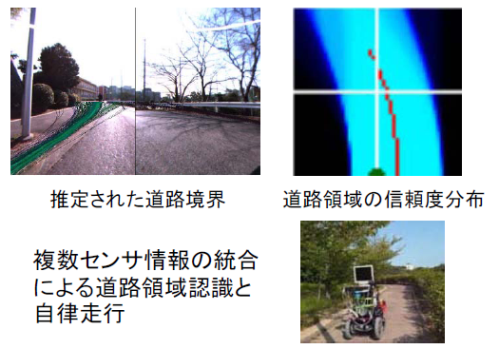
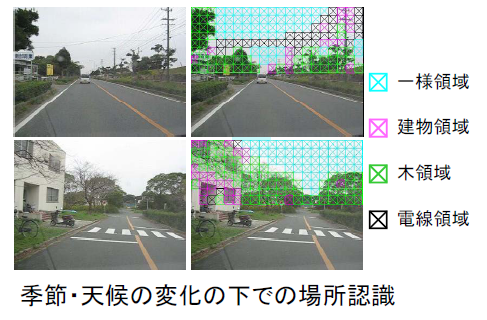
カメラや距離センサなどを用いて通行可能領域を検出し,位置を認識しながら屋外を移動するロボットを開発しています.屋外では季節や天候の変化によって画像が大きく変化しますが,物体の見えと位置のモデル学習により安定して位置を認識します.