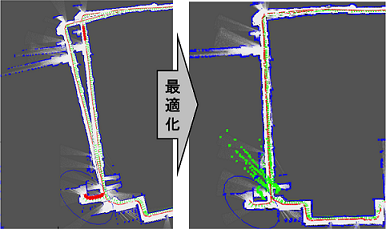
LIDAR-based Mapping of indoor environments has been one of the main topics in mobile robotics. Although various effective methods have been developed fo this problem, it is still sometime weak in environments with very large loops. We propose to improve conventional SLAM methods by improving loop closing using WiFi signals. We also developed a user localization method using a smartphone and a WiFi-enhanced map.
[References]
- T. Kudo and J. Miura, "Utilizing WiFi Signals for Improving SLAM and Person Localization", Proc. 2017 IEEE/SICE Int. Symp. on System Integration (SII-2017), Taipei, Taiwan, Dec. 2017.
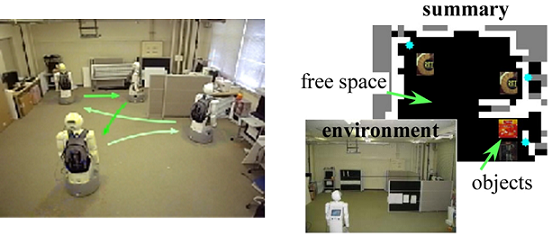
Service robots have to obtain necessary information of the operating environment, such as geometrical structures and object locations, for providing appropriate and timely services. Since the time for summarization is usually limited, viewpoint planning for efficient summarization is indispensable.
We have developed methods for viewpoint planning which considers not only various uncertainties in observation but also time limitation. The proposed algorithm enables a robot to make an appropriate summarization for a given time limitation.
[References]
- H. Masuzawa and J. Miura, "Observation Planning for Environment Information Summarization with Deadlines", Proc. 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 30-36, Taipei, Taiwan, Oct. 2010.
- M. Boussard and J. Miura, "Observation planning for object search by a mobile robot with uncertain recognition", Proc. 12th Int. Conf. on Intelligent Autonomous Systems, F3B.5, Jeju Island, Korea, June 2012.

Exploratory actions are required for mapping of unknown environments. It is also necessary to observe only on informative regions of the environment for efficient mapping. We have developed a 3D indoor mapping method that combines a frontier-based exploration planning and a coverage planning considering the field of view of sensors. We are also developing methods for integrating (or parallelizing) viewpoint planning for exploration, coverage, and object localization.
[References]
- D.F. Sasongko and J. Miura, "An Integrated Planning of Exploration, Coverage, and Object Localization for an Efficient Indoor Semantic Mapping", Proc. 15th Int. Conf. on Intelligent Autonomous Systems (IAS-15), Baden-Baden, Germany, June 2018.
- Y. Okada and J. Miura, "Exploration and Observation Planning for 3D Indoor Mapping", Proc. 2015 IEEE/SICE Int. Symp. on System Integration (SII-2015), pp. 599-604, Nagoya, Japan, Dec. 2015.
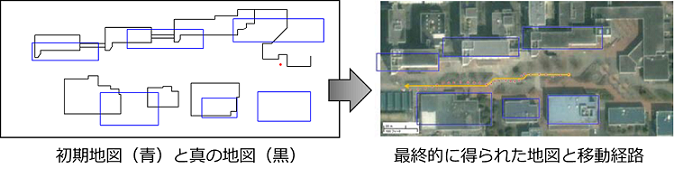
We propose a method of navigating a mobile robot in outdoor using a hand-drawn line drawing building map. Hand-drawn maps often include various types of uncertainty such as incorrect size/position and missing objects, thereby making it difficult to establish correspondence between objects in the map and sensory data. We solve this problem using a SLAM approach with an input hand-drawn map being an initial estimate. The proposed method combines a FastSLAM with a particle swarm optimization (PSO) for map refinement. The method has been successfully applied to a stereo-based localization using a map with a large error in a real scene.
[References]
- K. Matsuo and J. Miura, "Outdoor Visual Localization with a Hand-Drawn Line Drawing Map using FastSLAM with PSO-based mapping", Proc. 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS2012), pp. 202-207, Oct. 2012.
- K. Matsuo, J. Miura, and J. Satake, "Stereo-based Outdoor Localization using a Line Drawing Building Map", Proc. 2011 European Conf. on Mobile Robots (5th ECMR), pp. 309-314, Sep. 2011.
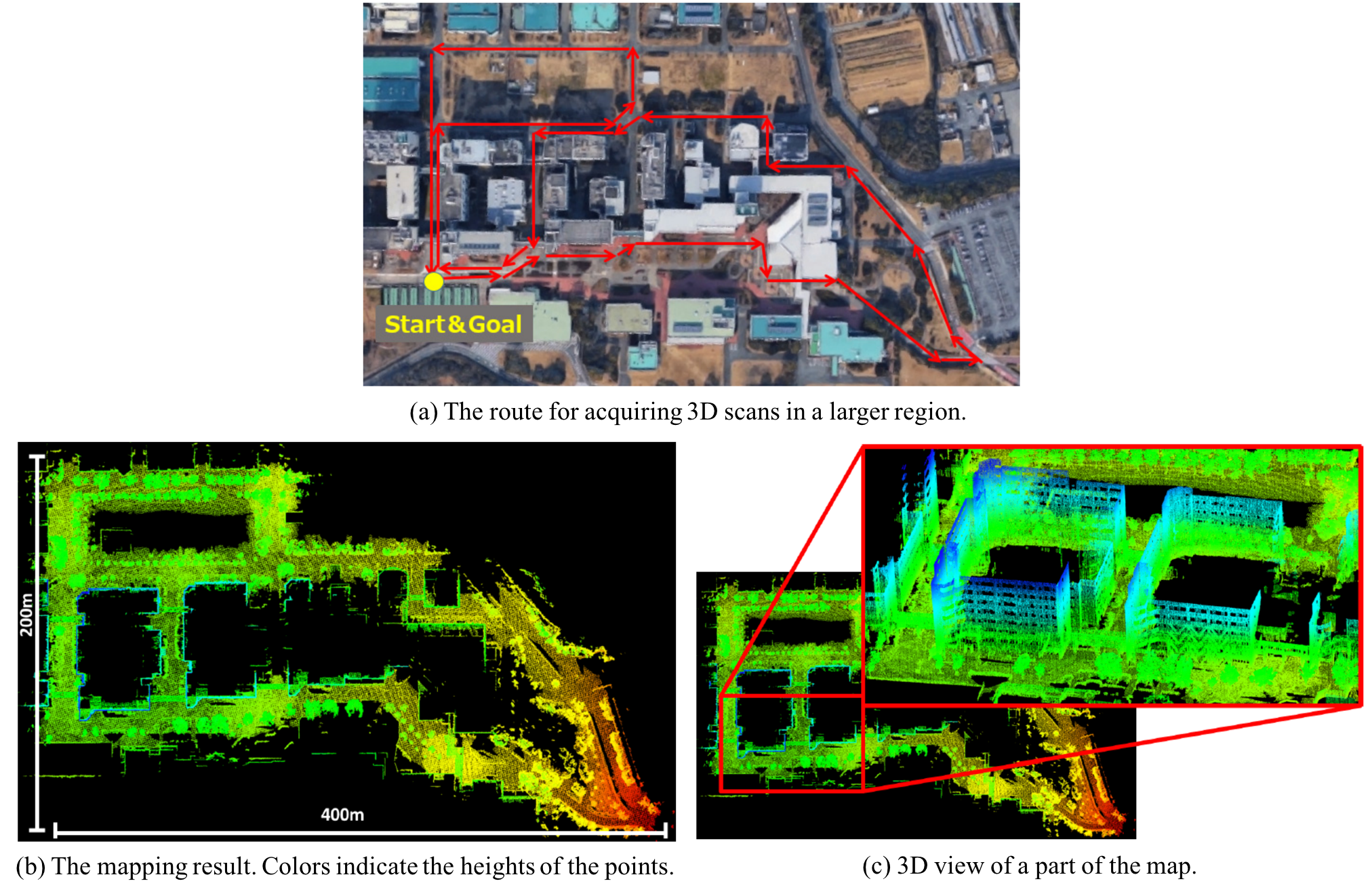
We have developed a method of 3D LIDAR-based mapping of large-scale environments (e.g., an entire campus). We utilize a NDT-based registration for ego-motion estimation for an initial mapping. Loop closure candidates are detected by robot motion estimates, GPS signals (if available), and shape signature features, and then validated by NDT-based scan matching. An efficient optimization algorithm is applied to close detected loops. We successfully constructed a consistent 3D map of our campus.
[References]
- T. Sakai, K. Koide, J. Miura, S. Oishi, "Large-scale 3D Outdoor Mapping and On-line Localization using 3D-2D Matching", Proc. 2017 IEEE/SICE Int. Symp. on System Integration (SII-2017), Taipei, Taiwan, Dec. 2017.