Research Projects
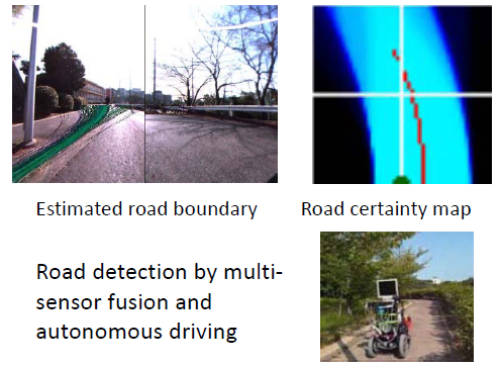
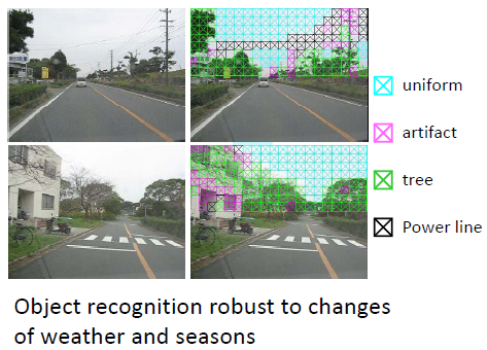
Outdoor Mobile Robots
Develop vision-based mobile robots that can detect traversable regions and localize themselves by comparing the memorized images with input ones. The robot uses models of object views which consider view changes due to changes of weather and seasons. An SVM-based method is developed for modeling objects and locations with least user efforts.