
We have been developing robots that can attend a specific person with
also paying attentions to surroundings including other persons and
obstacles. Attending behaviors are planned adaptively depending on the
state of the attended person (such as walking, talking with others,
sitting).
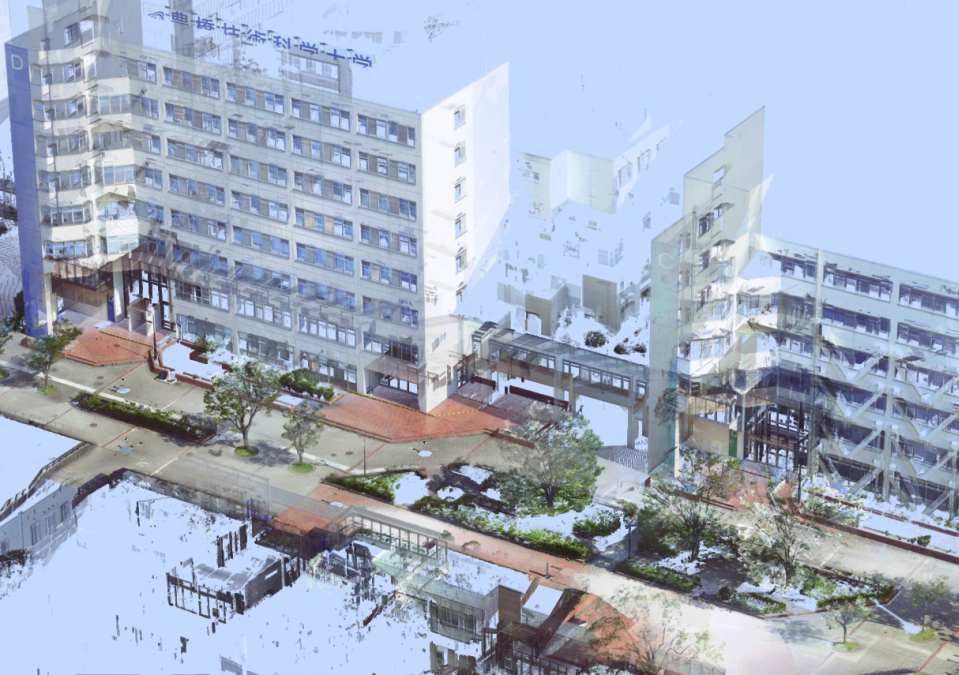
Localization and mapping are the most fundamental functions of
autonomous mobile robots. We have been developing methods for indoor
and outdoor localization and mapping using cameras and/or LIDARs.
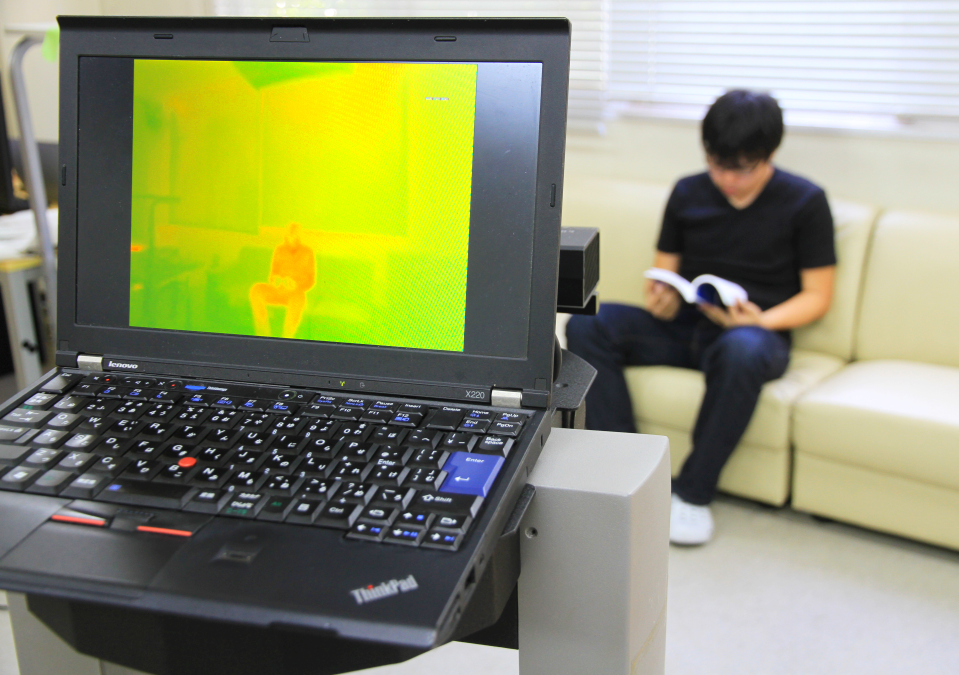
We have been developing mobile robots for lifestyle support for the
elderly and the disabled at home or in carehouses. Such a robot
measures the physical state of the residence as well as human states
and takes appropriate actions such as controlling appliances and
issuing alerts.

Human-robot interaction research is important for developing
human-friendly service robots. We have been developing methods for
human-robot collaborative assembly and collaborative remote object
search. Various human-robot interfaces have also been developed such
as vision-based interface and brain-machine interface.

We have been developing methods for autonomous driving and outdoor
navigation such as road boundary estimation, view-based localization,
and pedestrian detection.