
|
データ型一覧
・IIS::TimedPose2D
IIS::TimedPose2Dはロボットの位置・姿勢を格納するデータ型です。 ・Pose2D data: x(X座標[m])、y(Y座標[m]), heading(向き[radian])を格納。
なお、ロボットの位置・姿勢には下の図に示す座標系を用います。 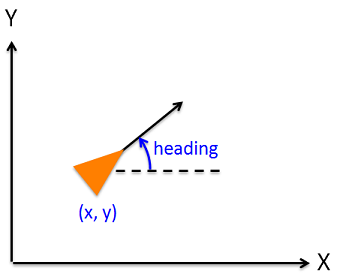 ロボット位置・姿勢の座標系 IIS::TimedVelocity2Dはロボットの速度を格納するデータ型です。 ・Velocity2D data: vx(速度[m/s])、vy(速度[m/s]), va(角速度[radian/s])を格納。
IIS::TimedPose2DSeqはロボットの位置・姿勢の系列を格納するデータ型です。 ロボットの目的地として用いる場合、要素数は1で通常使用します。 また、要素数0の場合は停止要求とみなし目的地を破棄して停止することを表します。 ・Pose2D data: x(X座標[m])、y(Y座標[m]), heading(向き[radian])の系列を格納。
IIS::TimedPoseVel2DSeqはロボットの移動経路を指示するための位置・姿勢(中間目的地)と速度の系列を表す データ型です。中間目的地での最大速度を(vx, vy, va)で表現します。経路の速度制限に利用可能です。 ただし各パラメータは必ず守らなければならないものではなく、局所経路計画の実装次第では無視されます。 また、要素数0の場合は停止要求とみなし目的地を破棄して停止することを表します。 ・PoseVel2D data :
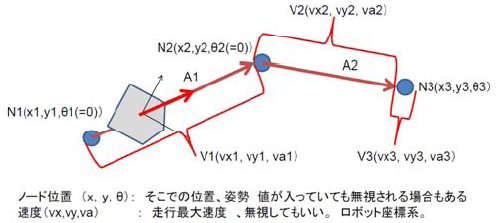 TimedPoseVel2DSeq MRFC::TimedEstimatedPose2Dは自己位置推定結果のロボットの位置・姿勢を格納するデータ型です。 推定位置とその推定位置におけるオドメトリ値をペアで出力します。 ・Pose2D ododata: 推定位置におけるオドメトリを格納。 ・Pose2D estdata: 推定された自己位置を格納。
MRFC::AbosoluteMapServiceは大域地図(絶対座標系地図)を扱うためのインターフェースです。 インターフェースに含まれるサービスは以下の通りです。 ・RTC::OGMapConfig getAbsoluteOGMapConfig();
 大域地図の仕様 MRFC::RelativeMapServiceは局所地図(ロボット座標系地図)を扱うためのインターフェースです。 インターフェースに含まれるサービスは以下の通りです。 ・RTC::OGMapConfig getRelativeOGMapConfig(); 地図の情報を取得。
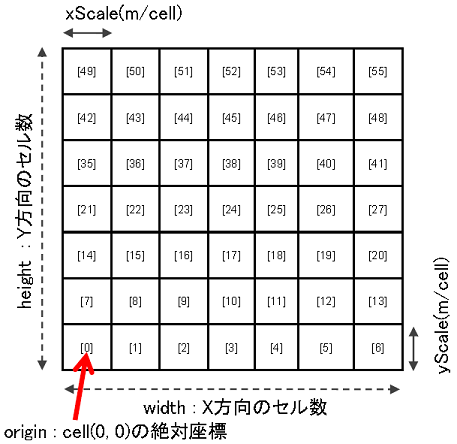
 局所地図の仕様 大きさやスケールといった地図の情報を格納するデータ型です。 なお、大域地図を扱う場合のoriginの姿勢情報には常に0が格納されます。 ・double xScale: X軸方向の地図のスケール[m/cell]
地図をocted型の系列で表現したデータ型です。 ここで、octed型は8bitの符号付整数(-128〜127)であり、各セル毎の障害物の存在確率を0から100の値で格納しています。 また、そのセルが未観測の場合(未知領域の場合)は-1が格納されます。 ・RTC::OGMapConfig mapconfig: 地図の大きさやスケール
大域地図の仕様 MRFC::TimedFloatAbsoluteOGMapData
地図をfloat型の系列で表現したデータ型です。 ここで、float型は単精度浮動少数であり、 各セル毎の障害物の存在確率を0.0から1.0の値で格納しています。 また、そのセルが未観測の場合(未知領域の場合)は負の値が格納されます。 ・RTC::OGMapConfig mapconfig: 地図の大きさやスケール
大域地図の仕様 地図をocted型の系列で表現したデータ型です。 ここで、octed型は8bitの符号付整数(-128〜127)であり、 各セル毎の障害物の存在確率を0から100の値で格納しています。 また、そのセルが未観測の場合(未知領域の場合)は-1が格納されます。 ・RTC::OGMapConfig mapconfig: 地図の大きさやスケール
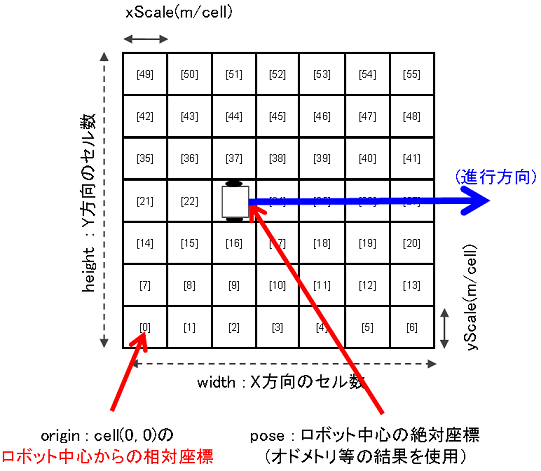
局所地図の仕様 MRFC::TimedFloatRelativeOGMapData
地図をfloat型の系列で表現したデータ型です。 ここで、float型は単精度浮動少数であり、 各セル毎の障害物の存在確率を0.0から1.0の値で格納しています。 また、そのセルが未観測の場合(未知領域の場合)は負の値が格納されます。 ・RTC::OGMapConfig mapconfig: 地図の大きさやスケール
局所地図の仕様 複数人物の位置と速度をロボット座標系で表現するデータ型です。 ・PeopleTrackingData data: 人の位置・速度
複数人物の位置と速度をロボット座標系で表現するデータ型です。 ・long id: person[id]に位置・速度が格納されている人物を追従対象として指定する。
複数人物の位置と速度をロボット座標系で表現するデータ型です。 ・RTC::Point3D position: 人物の座標[m] (x,y,z)
タイムスタンプを付加した画像を格納するデータ型です。 ・RTC::Time tm;
画像を格納するデータ型です。各変数はOpenCVのIplImage型と同じですのでそちらを参考にして下さい。 ・long nChannels;
タイムスタンプを付加したステレオ距離データを格納するデータ型です。 ・RTC::Time tm;
ステレオ距離データを格納するデータ型です。 ・double x, y, z;
エリア情報を取得するためのインターフェースです。 インターフェースに含まれるサービスは以下の通りです。 ・TUT::TimedAreaInfo getAreaInfo(); エリアとエリアの境界線を現すデータ型です。境界線は2つの座標をつなぐ線分として表現されます。 ・RTC::Point2D p1, p2: 線分を表す2つの2次元座標[m] (x,y) 隣接エリアとのリンクを表すデータ型です。各エリアは、ただ接しているのではなく、隣接エリアに移動可能である場合にこのデータを持ちます。 ・long id: 境界線の先にある隣接エリアのID
空間を分割して得られた1つのエリア。 ・long id: このエリアのID
全エリアの系列であり、大域行動計画を行う際のグラフとしての役割を果たすデータ型です。 ・sequence‹TUT::AreaInfo> data: エリアの系列
TUT::TimedPersonsGlobalPosition
複数人物の位置を絶対座標系で表現するデータ型です。 ・sequence‹RTC::Point2D> data: 人物の座標[m] (x,y)
|

