|
使用例

・GlobalMapViewerの利用
・シミュレータ上での大域地図生成
・シミュレータ上での局所地図生成
・シミュレータ上での人物検出
・シミュレータ上での大域経路計画
GlobalMapViewerの利用
大域地図を表示するGlobalMapViewer RTCの基本的な表示機能を確認する。
使用RTC:
・大域地図表示RTC
・SimpleGlobalMapLoader RTC
・DummyPoseSender RTC
・GoalPoseSender RTC
・Dummy2PosesSender RTC
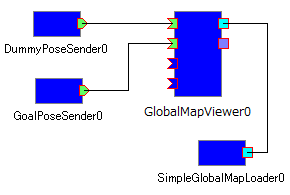 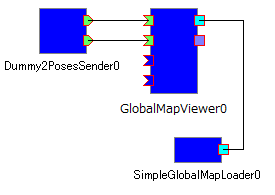
構成(左右の2通りの構成で同様の結果が得られる)
 
SimpleGlobalMapLoader RTCが読み込む地図(左)と実行結果(右)
シミュレータ上での大域地図生成
大域地図生成を環境シミュレータRTCを用いてテストする。
シミュレータ上のロボットをWiiリモコンで操作し、移動しながら得られたセンサの情報を基に大域地図を生成する様子を確認することができます。
使用RTC:
・WiiRemote to Robot データ型変換RTC
・大域地図生成RTC
・環境シミュレータRTC
・大域地図表示RTC
・WiiRemoteComponents
WiiRemoteComponentsは芝浦工業大学 ヒューマンロボットインタラクション研究室が開発したものを利用しています。
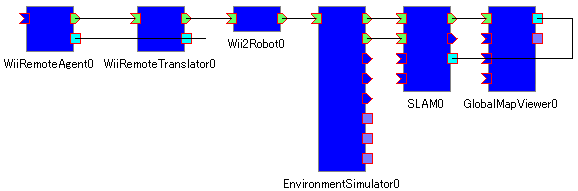
構成
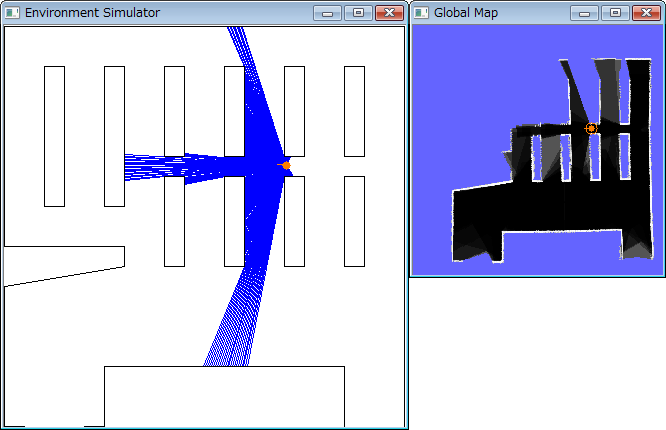
実行結果
シミュレータ上での局所地図生成
局所地図生成を環境シミュレータRTCを用いてテストする。
使用RTC:
・局所地図生成RTC
・環境シミュレータRTC
・局所地図表示RTC
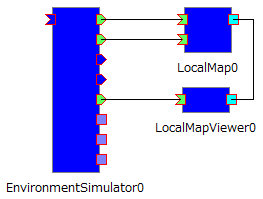
構成
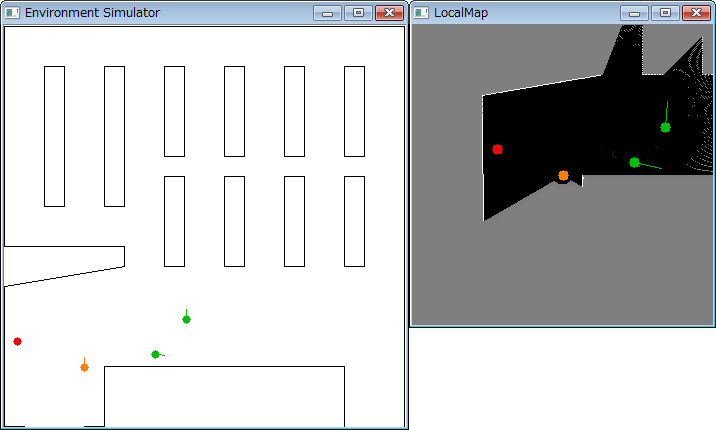
実行結果
シミュレータ上での人物検出
人物検出を環境シミュレータRTCを用いてテストする。
使用RTC:
・人物検出RTC
・環境シミュレータRTC
・大域地図表示RTC
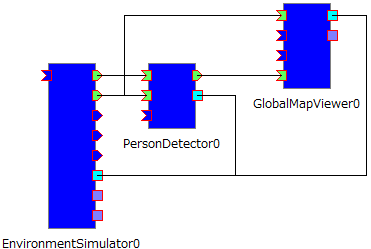
構成
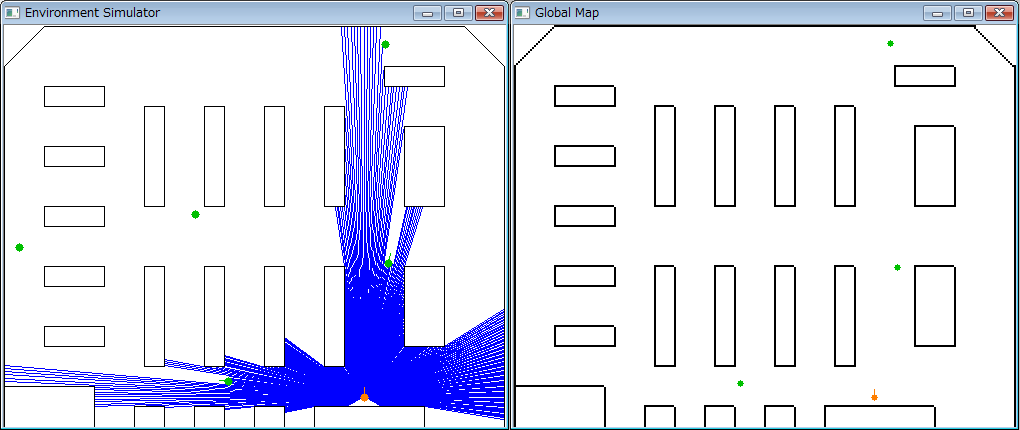
実行結果
レーザの範囲内にいる人が検出され、右図の大域地図上に表示されていることが分かる。
シミュレータ上での大域経路計画
大域経路計画を環境シミュレータRTCを用いてテストする。
使用RTC:
・大域経路計画RTC
・環境シミュレータRTC
・大域地図表示RTC
・GoalPoseSenderRTC
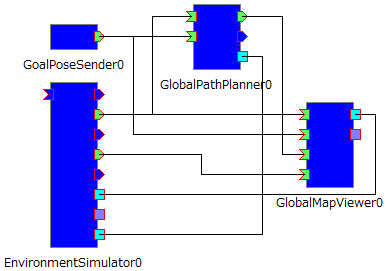
構成
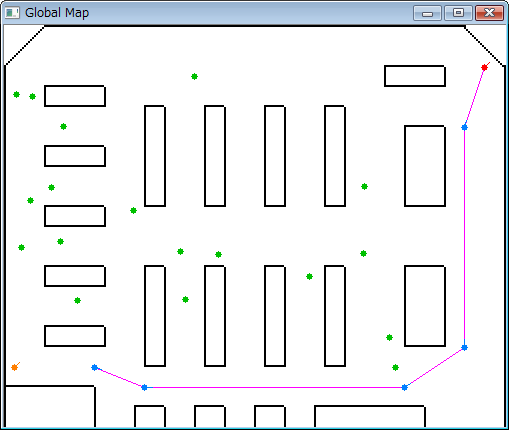
実行結果
| 
